
- Updated: June 27, 2026
- 6 min read
Reference-Free Assessment of Physical Consistency in World Model-based Video Generation
Direct Answer
The paper introduces a set of reference‑free metrics that automatically gauge the physical consistency of videos generated by world‑model‑based systems, and it shows that filtering out inconsistent clips can boost downstream task success by more than 8 %.
This matters because it gives researchers and product teams a scalable way to close the simulation‑to‑reality gap without relying on costly human voting or unavailable ground‑truth video references.
Background: Why This Problem Is Hard
World‑model video generators—such as those powering robotic simulators like WorldGym or evaluation suites like WorldEval—promise to synthesize realistic scenes that obey the laws of physics. In practice, however, the generated footage often contains subtle violations: objects pass through walls, momentum is lost for no reason, or collision dynamics are implausible. These artifacts are invisible to standard pixel‑level metrics (e.g., FVD) but can cripple downstream agents that rely on accurate physical cues.
Existing evaluation pipelines fall into two camps:
- Elo‑style human voting: Researchers recruit annotators to rank video quality, then aggregate scores with an Elo system. This approach is expensive, slow, and suffers from inter‑rater variability.
- Reference‑based video metrics: Methods like Fréchet Video Distance (FVD) compare generated clips against a ground‑truth dataset. When the target task has no real‑world reference—common in novel robotics simulations—these metrics become unusable.
Because the physical fidelity gap directly translates into lower task success rates for embodied agents, a reliable, automated, and reference‑free assessment is a critical missing piece for scaling AI‑driven simulation environments.
What the Researchers Propose
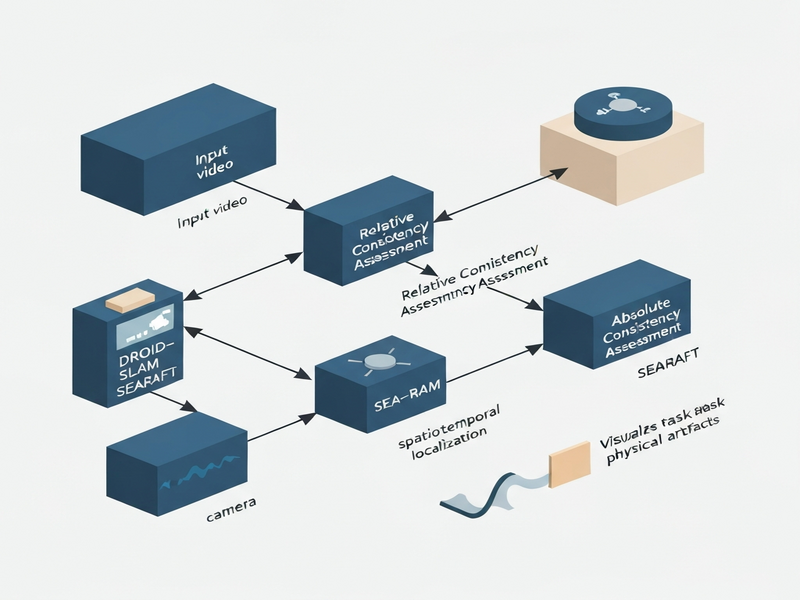
The authors present a two‑pronged framework that evaluates physical consistency without any external ground truth:
- Relative Consistency Assessment: Using off‑the‑shelf visual odometry (DROID‑SLAM) and dense optical flow (SEA‑RAFT), the system quantifies how much a generated video deviates from internally consistent motion patterns. The metric is “relative” because it compares each clip against a learned baseline of plausible dynamics derived from the same model’s own output distribution.
- Absolute Spatio‑Temporal Localization: Building on the WorldScore concept, the method pinpoints the exact frames and spatial regions where physical violations occur. This “absolute” view produces heat‑maps that can be visualized, enabling developers to debug and improve their world models.
Both components are fully automated, require no human labels, and can be applied to any video generator that produces RGB frames and optional depth or pose streams.
How It Works in Practice
The workflow can be broken down into four logical stages:
1. Video Generation
A world‑model agent (e.g., a diffusion‑based video generator) produces a sequence of frames that represent a simulated task—such as a robot picking up a block and placing it on a shelf.
2. Motion Extraction
DROID‑SLAM processes the RGB stream to estimate camera trajectory and sparse 3D point clouds, while SEA‑RAFT computes dense optical flow between consecutive frames. These two signals together capture both global motion (camera pose) and local object dynamics.
3. Consistency Scoring
The relative consistency score is derived by measuring the divergence between the estimated motion and a statistical model of “physically plausible” motion learned from a large corpus of generated videos. Large divergences flag potential violations.
4. Localization & Visualization
When a clip exceeds a predefined inconsistency threshold, the absolute module generates spatio‑temporal heat‑maps that overlay on the original frames, highlighting where and when the physics break down. These visualizations can be inspected directly by engineers or fed back into a training loop for model refinement.
What sets this pipeline apart is its independence from any external reference video. By leveraging self‑supervised motion cues, the system can be deployed on‑the‑fly in large‑scale simulation pipelines, dramatically reducing the need for manual quality control.
Evaluation & Results
The authors evaluated their framework on two benchmark suites:
- WorldGym Manipulation Tasks: A set of robotic pick‑and‑place scenarios where success is measured by the robot’s ability to complete the task in a simulated environment.
- WorldEval Physical Reasoning: A collection of videos that require agents to infer object stability, trajectory feasibility, and collision outcomes.
Key findings include:
- Applying the relative consistency filter to the generated dataset removed roughly 12 % of clips that exhibited severe physics violations.
- Task success rates on the filtered set rose by **over 8 %** compared to the unfiltered baseline, narrowing the simulation‑to‑reality gap.
- The absolute localization module produced interpretable heat‑maps that matched human intuition about where the physics broke down (e.g., a block slipping through a table edge).
Figure 1 illustrates a typical heat‑map generated by the absolute assessment, showing bright regions where the model’s predicted motion diverges from the SLAM‑derived trajectory.
These results demonstrate that reference‑free consistency metrics are not only feasible but also impactful: they provide a concrete lever for improving downstream agent performance without any additional human annotation budget.
Why This Matters for AI Systems and Agents
For practitioners building embodied AI—whether in robotics, autonomous driving simulators, or virtual training environments—the ability to automatically prune physically implausible videos translates into three immediate benefits:
- Higher Fidelity Training Data: Reinforcement‑learning agents trained on physically consistent videos learn more accurate dynamics, leading to better real‑world transfer.
- Cost‑Effective Evaluation: Companies can replace expensive Elo‑style human studies with a fully automated pipeline, freeing up resources for model iteration.
- Debug‑First Development: The spatio‑temporal visualizations act as a diagnostic dashboard, allowing engineers to pinpoint failure modes in their world models quickly.
Enterprises that already leverage the Enterprise AI platform by UBOS can integrate these metrics into their existing workflow automation studio, creating a closed loop where video generation, consistency checking, and model retraining happen in a single pipeline.
Similarly, developers of AI marketing agents can adopt the same consistency checks when generating synthetic video ads, ensuring that visual artifacts do not undermine brand perception.
What Comes Next
While the proposed framework marks a significant step forward, several open challenges remain:
- Generalization Across Domains: The current motion models are tuned for indoor manipulation tasks. Extending them to outdoor, fluid, or deformable object scenarios will require richer priors.
- Real‑Time Deployment: DROID‑SLAM and SEA‑RAFT are computationally intensive. Optimizing these components for real‑time inference could enable on‑the‑fly consistency checks in interactive simulators.
- Feedback‑Driven Model Improvement: Integrating the absolute heat‑maps directly into the loss function of video generators is an unexplored avenue that could accelerate convergence toward physically plausible outputs.
Future research may also explore hybrid approaches that combine reference‑free metrics with lightweight human-in-the-loop verification for edge‑case scenarios. The authors suggest that a modular API exposing consistency scores could become a standard evaluation layer for any world‑model framework.
Developers interested in prototyping such integrations can start by reviewing the UBOS platform overview, which offers pre‑built connectors for SLAM, optical flow, and custom metric dashboards.
References & Further Reading
- Reference‑Free Assessment of Physical Consistency in World Model‑based Video Generation (arXiv)
- WorldScore: A Metric for Physical Plausibility in Simulated Videos (conference paper)
- DROID‑SLAM: Deep Recurrent Optimisation for Visual Inertial Odometry (journal article)
- SEA‑RAFT: Self‑Ensembling Adaptive Optical Flow (preprint)