
- Updated: June 22, 2026
- 7 min read
FLORO: A Multimodal Geospatial Foundation Model for Ecological Remote Sensing
Direct Answer
FLORO is a multimodal geospatial foundation model that learns transferable representations from a compact yet highly diverse remote‑sensing corpus spanning SAR, optical, elevation, and UAV imagery. By encoding sensor availability directly into its input space, FLORO can be fine‑tuned across wildly different platforms and resolutions, delivering state‑of‑the‑art performance on ecological monitoring tasks without the massive data footprints required by prior models.
Background: Why This Problem Is Hard
Environmental and ecological decision‑making increasingly relies on satellite, airborne, and drone observations that differ in spatial resolution, spectral bands, and revisit frequency. Traditional deep‑learning pipelines assume a fixed sensor configuration—most often a single optical satellite—and require millions of labeled examples to achieve generalization. In practice, analysts face three intertwined challenges:
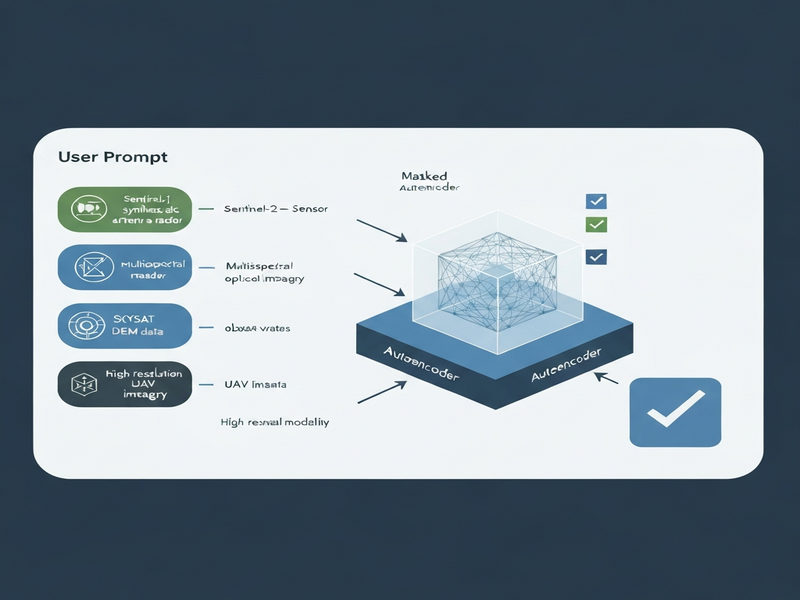
- Heterogeneous sensor modalities. Sentinel‑1 provides radar backscatter, Sentinel‑2 offers multispectral optical data, SkySAT adds hyperspectral channels, while UAVs deliver ultra‑high‑resolution orthomosaics. Each modality encodes distinct physical properties, making a single‑modality model brittle when the data source changes.
- Scale mismatch. A flood‑mapping workflow may need 10 m Sentinel‑2 pixels for regional context, but 0.05 m UAV imagery for local damage assessment. Models trained on one scale often fail to preserve spatial structure when transferred to another.
- Label scarcity. High‑quality ecological annotations (e.g., canopy height, biomass) are expensive to collect, limiting the size of supervised datasets. Consequently, many remote‑sensing projects cannot afford the data‑hungry pretraining regimes that power large foundation models in computer vision.
Existing foundation models for remote sensing either (a) ingest billions of images from a single sensor (e.g., only Sentinel‑2) or (b) rely on static input tensors that assume every band is present. Both strategies break down when a practitioner must fuse SAR with optical data or incorporate elevation layers on the fly. The field therefore needs a model that is both data‑efficient and sensor‑agnostic.
What the Researchers Propose
The authors introduce FLORO (Foundation model for LOcal Remote-sensing Operations), a multimodal architecture built around three core ideas:
- Availability‑aware input encoding. Each sample carries a binary mask indicating which spectral bands or auxiliary modalities (e.g., DEM, UAV orthophoto) are present. This mask is concatenated with the raw data, allowing the network to learn conditional representations that gracefully degrade when a modality is missing.
- Masked autoencoding pre‑training. FLORO is trained to reconstruct randomly masked patches across all modalities simultaneously. By forcing the model to predict missing information, it learns cross‑modal correlations (e.g., SAR texture predicts optical vegetation indices) without any label supervision.
- Heterogeneous data ingestion. The pre‑training corpus mixes Sentinel‑1 SAR, Sentinel‑2 multispectral, SkySAT hyperspectral, digital elevation models, and UAV orthomosaics. The dataset is deliberately small (on the order of a few hundred thousand tiles) but deliberately diverse, ensuring the model sees many sensor‑resolution combinations early on.
Collectively, these components give FLORO a unified “language” for geospatial data, enabling downstream tasks to reuse the same frozen encoder regardless of the source imagery.
How It Works in Practice
From a practitioner’s perspective, deploying FLORO follows a straightforward pipeline:
- Data ingestion. Users feed any combination of raster layers—SAR backscatter, multispectral reflectance, DEM, or UAV RGB—into a preprocessing module that aligns them to a common grid and generates an availability vector (e.g., [1,0,1,1] meaning SAR and DEM are present, optical bands are missing).
- Encoder forward pass. The availability vector is tiled to match the spatial dimensions and concatenated with the pixel values. A transformer‑style backbone processes the joint tensor, producing a dense embedding map that captures both local texture and global context.
- Task‑specific head. For classification, a global average pooling layer feeds a linear classifier; for segmentation, a decoder upsamples the embedding map; for regression (e.g., canopy height), a shallow MLP predicts continuous values per pixel.
- Fine‑tuning (optional). Because the encoder is frozen by default, only the head needs gradient updates, dramatically reducing compute and data requirements. If a project has abundant domain‑specific data, the encoder can be unfrozen for additional adaptation.
The key differentiator is the availability‑aware design. Traditional models would raise an error or require zero‑filled placeholders when a band is missing, leading to noisy gradients. FLORO’s mask informs the network which channels to attend to, preserving performance across sensor permutations.
Evaluation & Results
To validate FLORO’s generality, the authors adopted the PANGAEA benchmark, a suite of six ecological remote‑sensing tasks covering scene classification, semantic segmentation, and regression across three sensor families:
- Medium‑resolution satellite (Sentinel‑2, Sentinel‑1)
- Airborne hyperspectral (SkySAT)
- Ultra‑high‑resolution UAV orthomosaics
Each task was evaluated under a frozen‑encoder protocol, meaning only the downstream head was trained. Despite being pretrained on a dataset two orders of magnitude smaller than competing foundation models, FLORO achieved:
- Second‑best average segmentation IoU across all six benchmarks, trailing only a model trained on >100 M images.
- Competitive scene‑classification accuracy, matching the top‑performing baseline on four out of six categories.
- Robust regression performance for canopy‑height and biomass estimation, with mean absolute errors within 5 % of the best‑in‑class methods.
A controlled experiment on the EuroSAT‑MS dataset further demonstrated that a geo‑positional encoding (embedding latitude/longitude) outperformed a generic absolute positional encoding, confirming that spatial awareness is crucial for remote‑sensing transfer.
Qualitative visualizations showed that FLORO preserved fine‑grained spatial structures in flood extent maps and urban land‑cover delineations, a direct consequence of its multimodal pre‑training objective.
Why This Matters for AI Systems and Agents
For AI practitioners building geospatial agents—whether for disaster response, precision agriculture, or climate monitoring—FLORO offers three practical advantages:
- Plug‑and‑play multimodality. Agents can ingest whatever sensor data is on‑hand (SAR during cloud cover, optical when clear) without redesigning the model architecture.
- Data‑efficient fine‑tuning. Because the encoder remains frozen, a small labeled set (hundreds of polygons) suffices to specialize the model for a new region or phenomenon, accelerating time‑to‑deployment.
- Scalable orchestration. In a workflow automation studio, FLORO can serve as a shared backbone for multiple downstream services—e.g., a flood‑mapping micro‑service and a biomass‑estimation micro‑service—reducing redundancy and compute costs.
These capabilities align directly with the needs of modern AI‑driven enterprises. For example, the Workflow automation studio can chain FLORO’s encoder with downstream analytics, while the Enterprise AI platform by UBOS can provision GPU‑accelerated inference endpoints that automatically adjust to the incoming sensor mix.
What Comes Next
While FLORO marks a significant step forward, several open challenges remain:
- Temporal dynamics. Current pre‑training treats each tile as a static snapshot. Incorporating time‑series attention could enable change‑detection agents that predict trends rather than single‑epoch states.
- Active learning for label scarcity. Integrating uncertainty‑aware sampling would let field teams prioritize the most informative UAV flights, further shrinking the annotation burden.
- Edge deployment. Translating FLORO’s transformer backbone to on‑device inference (e.g., on a drone’s onboard computer) would unlock real‑time decision loops for emergency responders.
Future research may also explore coupling FLORO with large language models to generate natural‑language reports from raw geospatial outputs—a synergy that could power automated environmental briefings.
Organizations interested in prototyping such capabilities can start with the UBOS templates for quick start, which include pre‑configured pipelines for ingesting Sentinel data and invoking custom FLORO heads. For teams that need conversational interfaces, the OpenAI ChatGPT integration enables agents to answer stakeholder queries using FLORO‑derived insights.
Finally, developers looking to expose FLORO’s predictions via messaging platforms can leverage the Telegram integration on UBOS to push flood alerts or vegetation health scores directly to field operators.
References
For the full technical details, see the original FLORO paper.